Зачем нужны модели.
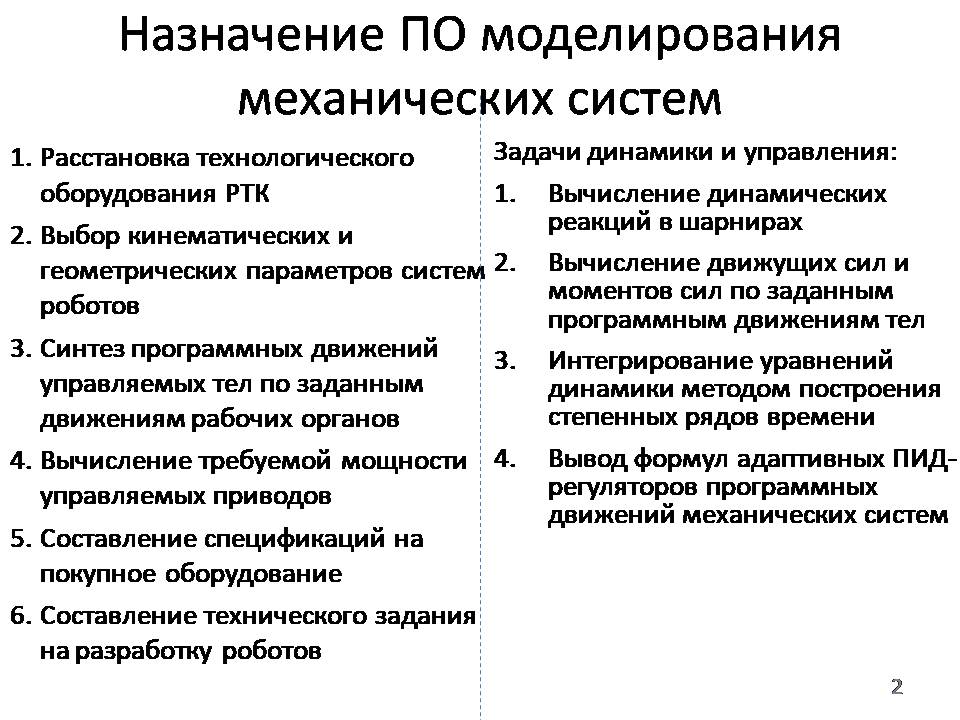
Если речь идёт о производстве, то его необходимо сначала спланировать. В частности, определить участки и выполняемые на них технологические операции, которые можно роботизировать. Использование вычислительных машин и соответствующего программного обеспечения позволяет эффективно решить решить ряд задач:
1. Расстановка технологического оборудования РТК
2. Выбор кинематических и геометрических параметров манипуляционных систем роботов
3. Синтез программных движений управляемых тел по заданным движениям рабочих органов
4. Вычисление требуемой мощности управляемых приводов
5. Составление спецификаций на покупное оборудование
6. Составление технического задания на разработку манипуляторов
На рынке существует большое количество программных продуктов, позволяющие решать эти задачи.
Почему так много ПО.
Причин несколько. Каждый разработчик стремиться разработать систему, которая бы давала преимущество перед аналогичным ПО в каком-либо аспекте моделирования. Например, в большей производительности при воспроизведении графики, или более точной симуляции, или удобстве моделирования, или в особой методику. Также развиваются информационные технологии и появляются новые 3D-форматы, повышающие детализацию моделей, но при этом экономящие пространство для их хранения. Поэтому существуют несколько десятков фирменных форматов трёхмерных моделей – каждый разработчик стремиться предложить собственное преимущество. Соответственно будут появляться программы моделирования роботов.
Мною разрабатывается собственное программное обеспечение для моделирования роботов. При его разработке используются Web-технологии, позволяющие исбежать недостатков, присущих аналогичным продуктам. Если суммировать эти недостатки, то можно назвать
Проблемы использования известных универсальных программных сред для исследования сложных механических систем:
• Трудности освоения
• Сложный многоуровневый оконный интерфейс
• Генерируются математические модели, имеющие следующие недостатки:
- сложный (громоздкий) вид;
- структурные, геометрические, кинематические и инерционные параметры не выражены в явном виде;
- отсутствует возможность решения задач синтеза механических систем с заданными свойствами;
не выделены в явном виде Ньютоновы, центробежные, Кориолисовы и гироскопические инерционные силы.
Какие возможности имеет разрабатываемое ПО с точки зрения трёхмерного моделирования. В нём предлагается три различных подхода к моделированию.
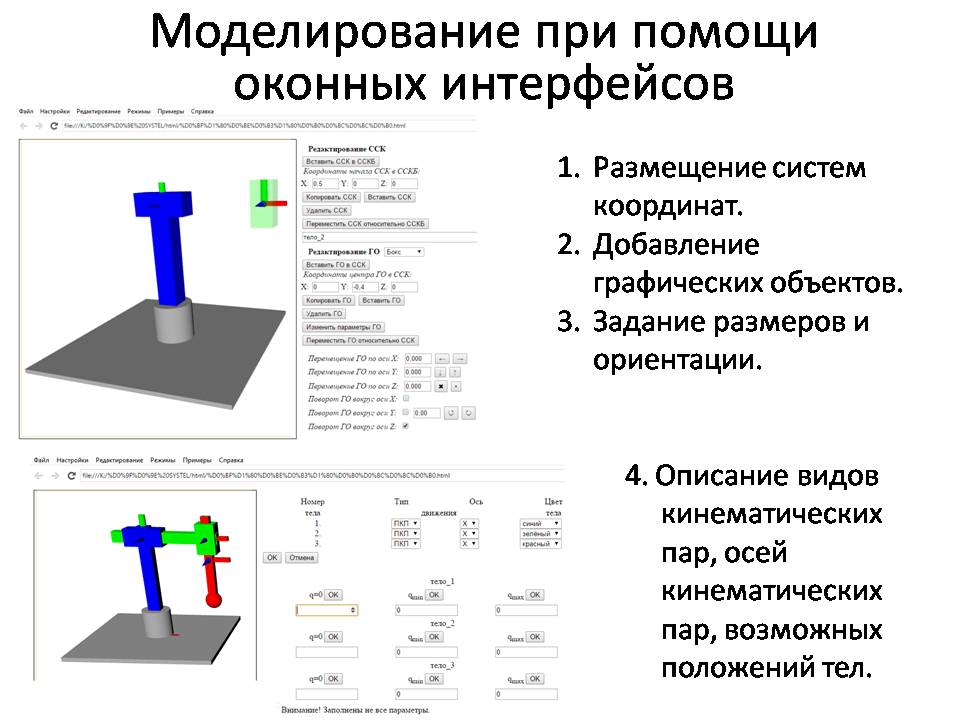
Сначала был релазизован модуль для построения моделей при помощи оконного интрефейса, как принято в других пакетах.
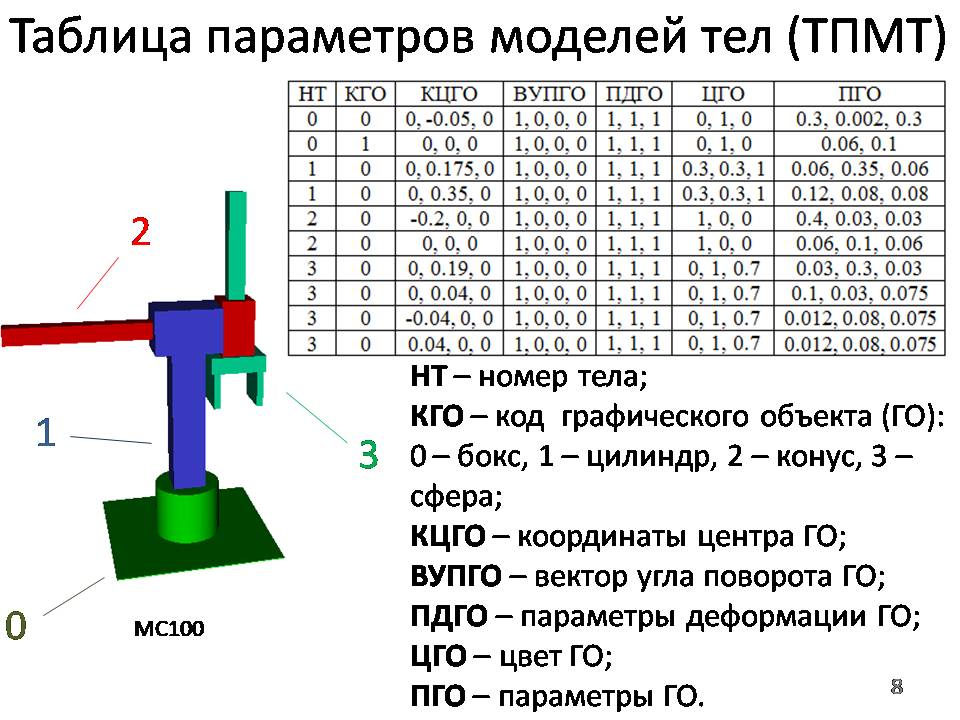
Пользователю в процессе работы предлагается расставить на сцене СК, связанные с каждым телом. Внутри каждой СК разместить ГО, моделюирующие тело, указать их геометрические размеры. После моделирования внешнего представления, вызывается окно описания кинематических пар, возможных относительных положений звеньев.
С использованием полученного опыта начались поиски того, как можно упростить работу с программой для более простого получения моделей.
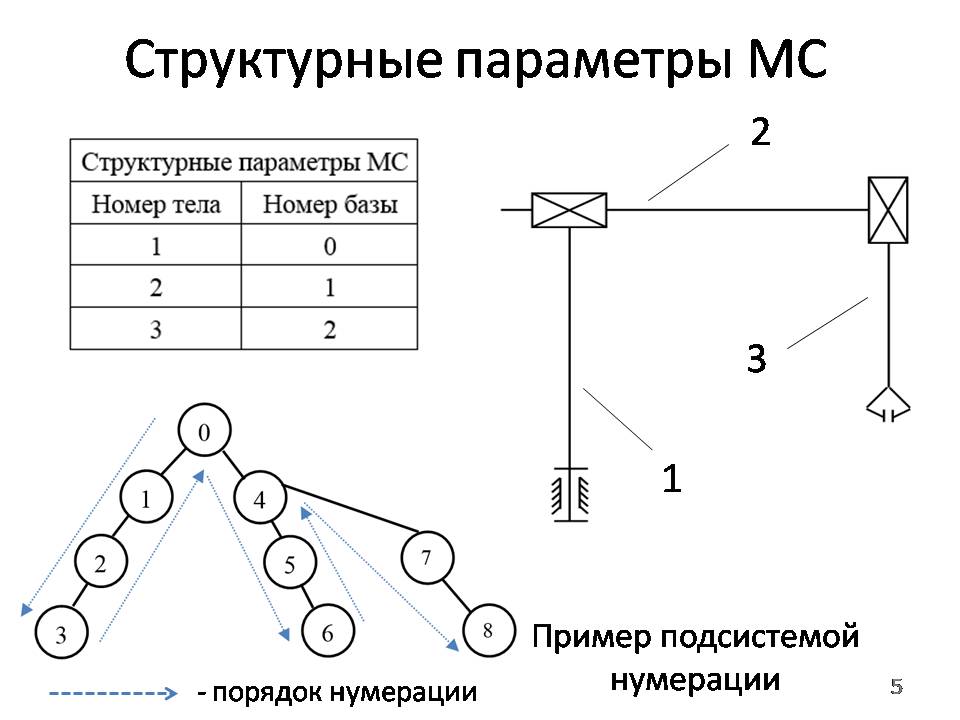
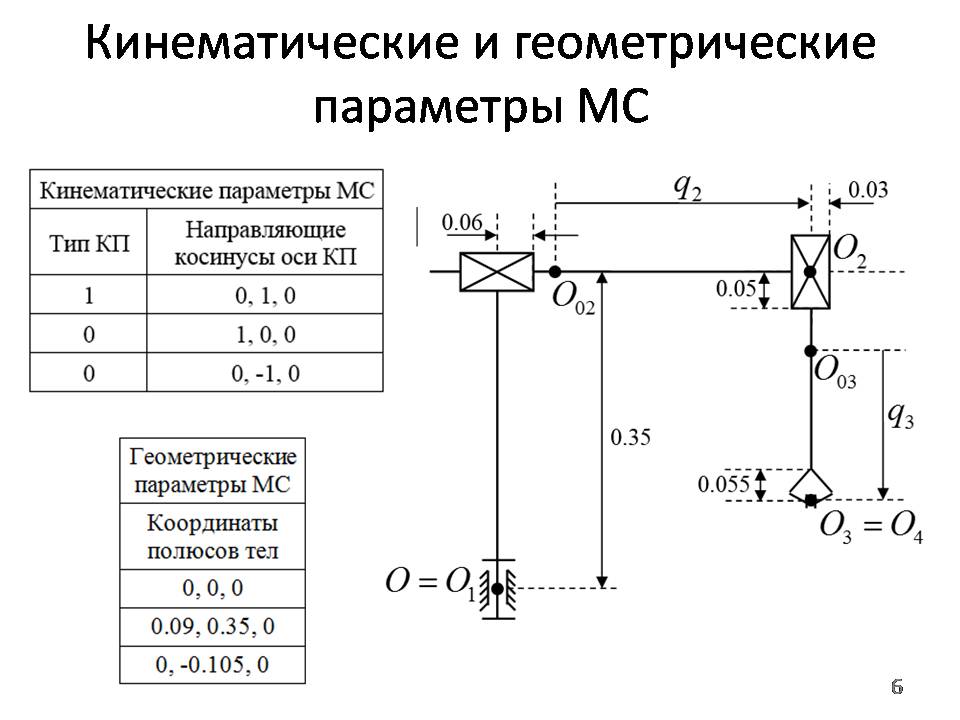
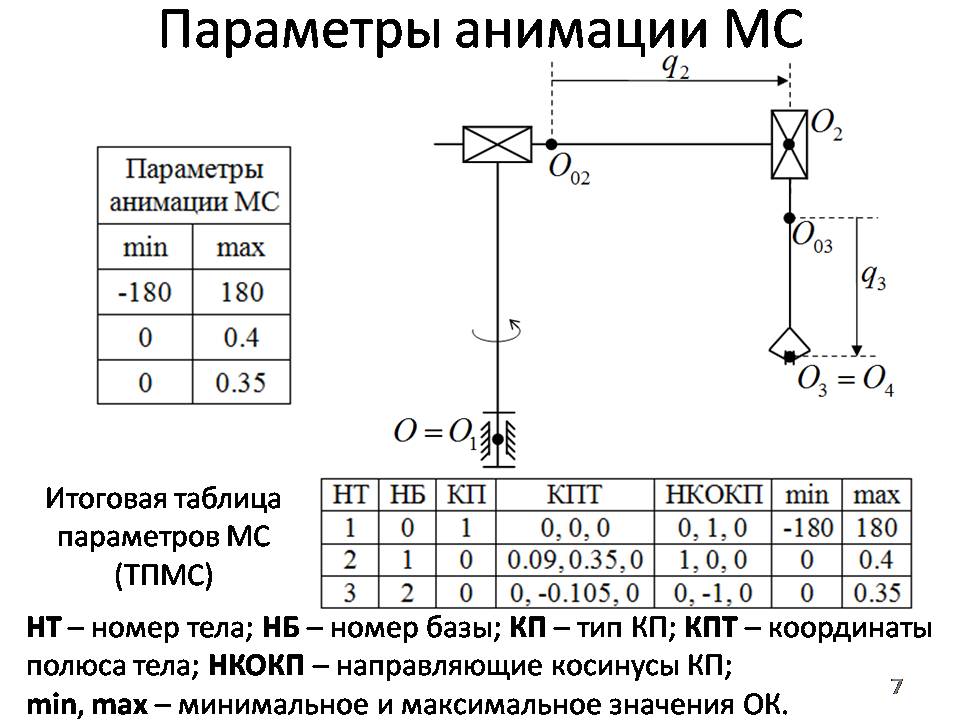
Пользователю предлагается провести предварительную аналитическую работу. Описать параметрически структуру МС, кинематику и геометрию МС, возможные положения тел. Затем приступить к работе с программой, внеся в неё определенные параметры, пользуясь табличным интерфейсом.
Таблиц нескоько и они имеют следующее описание.
После завершения работы с таблицами пользователь сохраняет их в постоянной памяти. В результате полное описание робота хранится в компактном виде, в виде таблицы.
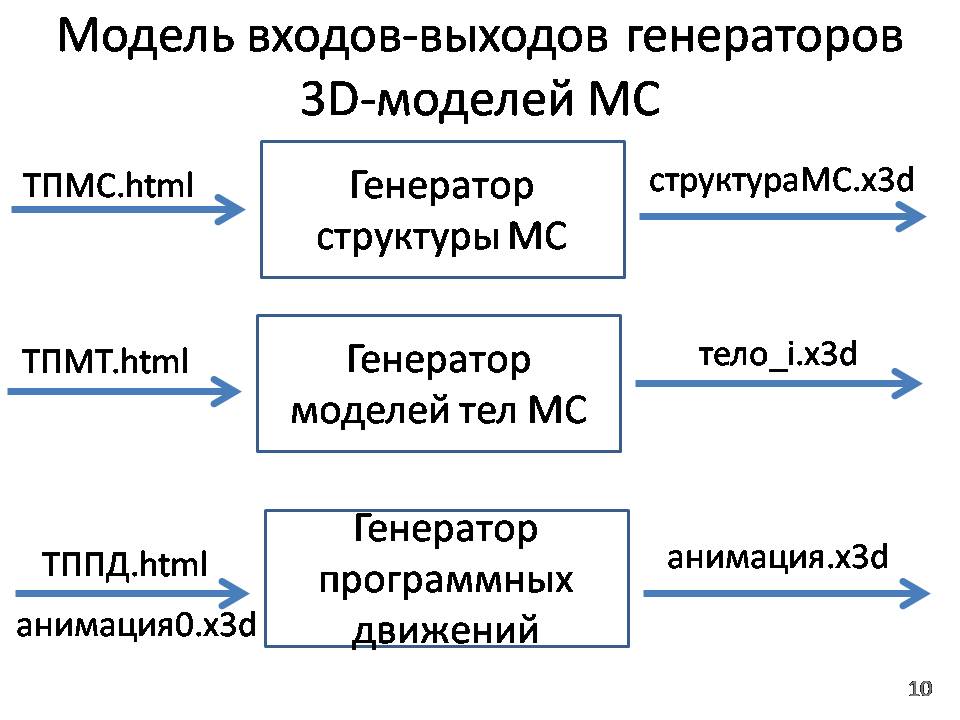
Когда возникает небходимость просмотреть модель в трёхмерном виде, пользователь запускает автоматическую генерацию трёхмерных моделей. В результате
Генераторов 3D-моделей несколько. Каждый на вход получает одну или несколько таблиц, а на выходе имеем X3D-файл.
Процесс. Генерация выполняется эффективно. В итоге работа с программой занимает значительно меньше времени, чем при построении модели при помощи оконных интерфейсов.
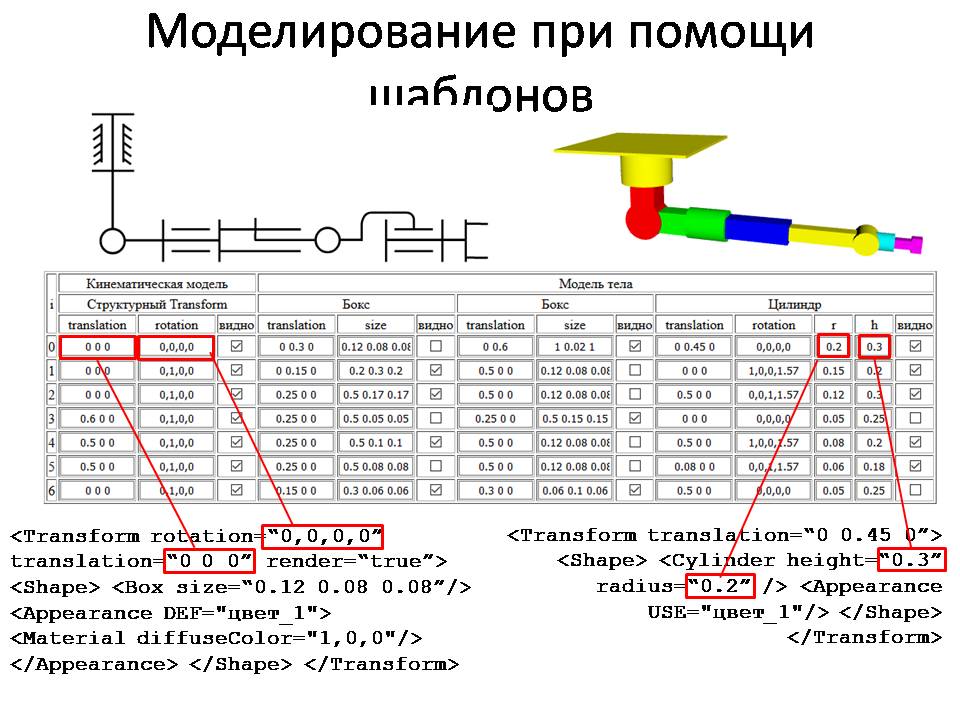
В дальнейшем было замечено, что многие МС имеют очень похожую структуру, кинематику и даже геометрию. И при заполнении таблиц пользователю приходится вносить одни и те же параметры. Поэтому был предложен третий способ моделирования при помощи шаблонов. Пользователю предлагается код с X3D-разметкой, который он должен отредактировать, внеся параметры конкретного робота. Изменение параметров автоматизировано в ПО. В частности предлагается опять же табличный интерфейс.
Если речь идёт о манипуляторах, то они...
Известно, что МС имеют однотипную структуру, геометрию и кинематику. В частности число подвижных тел не превышает шести. Концевое тело имеет схват, для размещения в нём объектов манипулирования. Первые три тела осуществляют перенос объектов манипулирования. Последние три тела МС ориентируют схват. Габариты первых тел значительно превосходят габариты последних. В качестве кинематических пар (КП) используются вращательные (ВКП) или поступательные (ПКП) КП. Таким образом, МС различаются между собой лишь значениями отдельных параметров.
При моделировании шагающих аппаратов.
Большинство ША состоят имеют следующие общие особенности. Они состоят из корпуса, к которому крепятся от двух до шести одинаковых ног. Каждая нога состоит из бедра, голени и стопы. Точки подвеса ног расположены в одной плоскости. Контакт стопы с опорной поверхностью можно считать точечным и т.д.
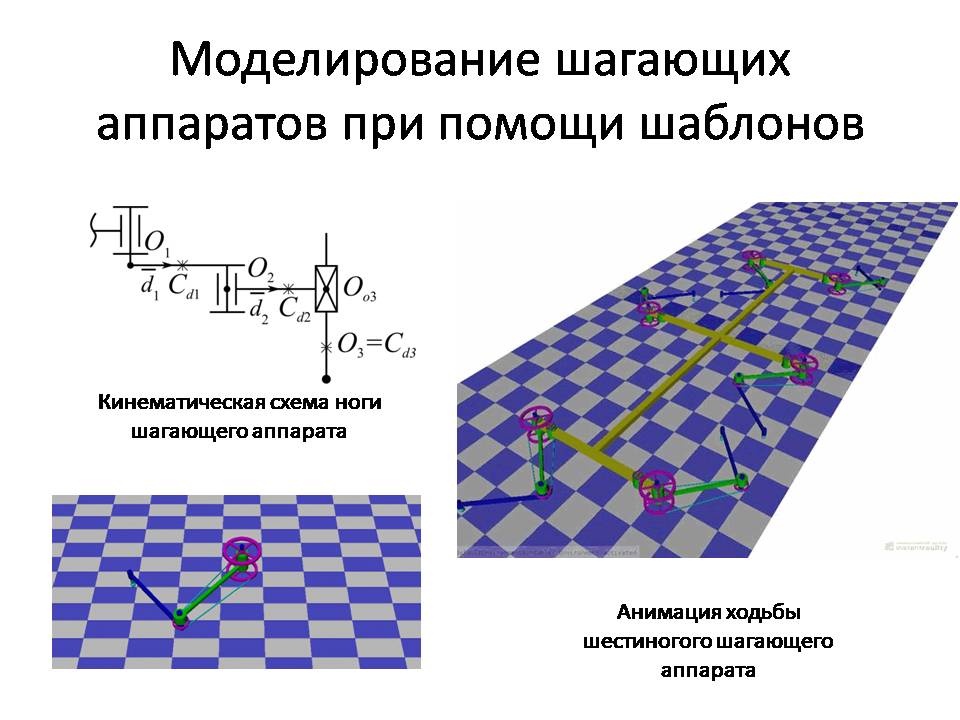
Поэтому шаблон их модели учитывает ...
При этом отпадает необходимость описывать структуру МС, добавлять множество графических объектов. Всё что требуется – это изменить параметры в шаблоне. Соотвестственно время моделирования вновь уменьшается.


Нами разрабатывается собственное методическое и программное обеспечение, которое призвано преодолеть перечисленные недостатки существующих программ.
МПО предназначено для моделирования управляемых систем тел (СТ) (манипуляторов, шагающих аппаратов, подъёмно-транспортных средств) с целью решения следующих задач:
- прямой и обратной задач динамики;
- синтеза программных движений (ПД) по заданным технологическим операциям роботизированных технологических комплексов (РТК), например, межоперационного транспортирования, покраски, дуговой или точечной сварки, сборки;
- составления спецификаций на покупное оборудование в составе РТК;
- составления технического задания на создание уникального (инновационного) оборудования РТК;
- генерации твердотельных моделей СТ и передачи (конвертирования) их в CAD-системы;
- синтеза уравнений механики СТ для решения задач проектирования СТ и управления ими;
- синтеза параметров СТ (структурных, кинематических, геометрических и инерционных параметров тел), обеспечивающих достижение целей роботизации машиностроительных производств;
- выбора установочной мощности приводов СТ, входящих в состав РТК;
- синтеза адаптивных ПИД-регуляторов, обеспечивающих заданное качество выполнения построенных ПД тел, входящих в состав РТК.
В МПО все СТ разделена на классы. Наиболее крупным из них является класс манипуляционных систем (МС) промышленных роботов. МС имеют определённую кинематическую и структурную специфику. Например, любая КП в МС либо поступательная, либо вращательная. По структурному классификационному признаку МС относится, как привило, либо к СТ с одной открытой ветвью, либо к СТ с одной замкнутой ветвью. Причём замыкается только последнее тело, т.е. захват с инструментом в процессе выполнения технологической операции. Для класса МС в МПО получены эффективные новые виды УД.
В качестве примера под номером (1) приведён вид УД ДСТ с вращательными КП, оси которых параллельны. Из (1) видно, что все геометрические, кинематические и массоинерционные параметры этих УД выражены в явном виде. Структурные параметры записаны в трёх знаках сумм на древовидных структурах данных. На основе этих УД решаются все перечисленные задачи для рассматриваемого класса ДСТ.
Аналогичные УД получены для нескольких классов СТ покрывающих все многообразие индустриальных роботов.
Для экспериментальной проверки результатов моделирования, построения программных движений и генерации управляющих программ на Электромеханическом факультете ЮУрГУ были созданы два макета электромеханических систем. Первый из них – манипулятор с полярной системой координат, где в качестве рабочего органа используется гелиевое перо для отрисовки графиков целевых кривых второго порядка в горизонтальной плоскости. Второй макет – мехатронное устройство с двумя поступательными и тремя вращательными кинематическими парами, образующими один цикл. В них применены роторные и линейные сервоприводы фирмы FAULHABER.
Манипулятор состоит из двух тел, первое из которых может вращаться вокруг вертикальной оси, а второе движется поступательно относительно первого. На первом этапе моделирования СТ пользователь последовательно заполняет таблицы параметров, описывающих СТ, а затем запускает автоматически сгенерированный на основе таблиц файл с 3D-моделью системы.
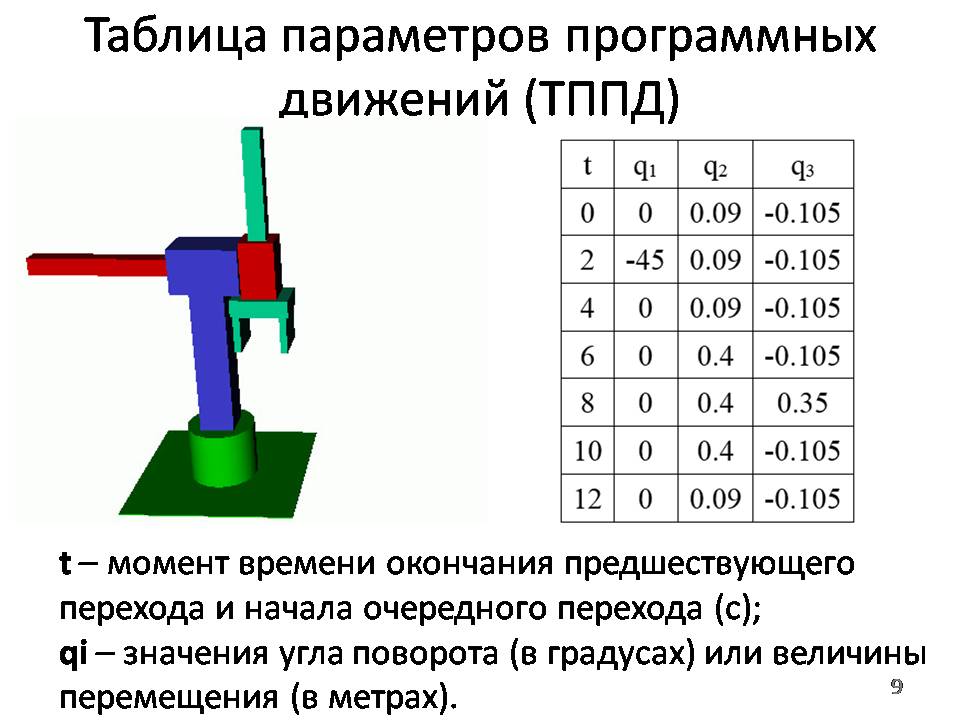
На завершающем этапе моделирования строятся ПД манипулятора. Для этого заполняется таблица параметров ПД (ТПД). Она имеет столбец, в который записываются моменты времени (t) анимации и N столбцов, которые содержат значения ОК тел в данный момент времени. На основе заполненной ТПД будет автоматически сгенерирован файл, содержащий команды управляющих программ приводов FAULHABER. Эти команды передаются на выполнение и механическая система повторяет движения построенные в виде модели. Рассмотренный манипулятор имеет одну открытую ветвь с двумя телами и приводами. Создаваемое МПО можно использовать для моделирования ДСТ с замкнутыми ветвями. Далее рассматривается мехатронное устройство, имеющее четыре подвижных тела, два привода и одну замкнутую ветвь.
Первое и третье тела движутся поступательно вдоль параллельных вертикальных направляющих под действием движущих сил линейных приводов. Второе и четвертое тела вращаются вокруг горизонтальных осей. Базой второго тела является первое тело. Базой четвертого – третье. Концы второго и четвёртого тел соединены шарниром. После первого этапа моделирования генерируется 3D-модель, приведённая на слайде. Движения звеньев СТ, не должны нарушать шарнирную связь второго и четвертого тел. В рассматриваемом случае эта связь описывается двумя уравнениями.
«Проклятие громоздкости» при использовании классических уравнений динамики не позволяет эффективно решать современные задачи управления движением тел, синтеза систем тел с заданными свойствами, идентификации параметров систем тел, а новые методы пока не показали свою эффективность. Предложенная классификация систем тел позволила получить новые виды уравнений динамики для каждого класса. Задачи управления движением тел СТ и методы их решения хорошо классифицированы и разработаны в теории управления динамическими системами и здесь важно правильно их использовать. Для решения конкретной задачи конкретным методом необходимо подобрать эффективный вид УД. Полученные новые виды уравнений динамики позволяют эффективно решать задачи синтеза. Используемые в работе XML-технологии позволяют эффективно формально описывать системы тел, предоставляют наглядное графическое представление системы, хранящее её структуру и задаваемые параметры, позволяют создать удобный интерфейс для измерения параметров системы, обеспечивают короткий код обработки информации.
Изложенные здесь результаты можно использовать для математического и X3D-моделирования СТ, в частности, индустриальных роботов в составе РТК с автоматической кодогенерацией управляющих программ для конкретных приводов с известной системой команд управления движением, например, для автоматизации технологических операций по покраске, сварке, сборке/разборке, транспортирования.
